News
See also our Twitter/X for frequent updates!
April 2024 - End of Life
Thank you to all who have visited the Multi-Moby website in the last years! As the Multi-Moby project has concluded, this website will no longer be updated. Once again, thanks for reading this website, and goodbye!
March 2024 - E-VOLVE Cluster webinar / Final dissemination event
Join us at the E-VOLVE Cluster webinar on 15th March, 10am CET, where we will present the final Multi-Moby results! We will have presentations from Multi Moby partners Valeo, DANA TM 4, Altreonic, I-FEVS, University of Surrey and Cidaut. There will also be presentations from other E-VOLVE Cluster members!
Multi-Moby initiated and is a co-organiser of the E-VOLVE Cluster webinar. The agenda can be found here.
Registration is free - sign up here!
January 2024 - Conclusion
The final review meeting took place on 16 January 2024 in Brussels, Belgium. With this, the Multi-Moby project has concluded. Many thanks to all project partners, as well as project officer Salima Abu Jeriban, for the successful completion of the project!
There will be a final dissemination webinar in March 2024, where we will showcase the results of the project. Stay tuned for more details!
December 2023 - Published journal paper
A paper by University of Surrey, titled "Enhanced Active Safety through Integrated Autonomous Drifting and Direct Yaw Moment Control via Nonlinear Model Predictive Control" has been published in "IEEE Transactions on Intelligent Vehicles".
This paper presents a nonlinear model predictive controller (NMPC) for path tracking, which integrates steering, front-to-total longitudinal tire force distribution, and direct yaw moment actuation, and can operate beyond the limit of handling, e.g., to induce drift, if this is beneficial to path tracking.
Download here (open access).
November 2023 - Final month of Multi-Moby
It's November 2023, the final month of the Multi-Moby project! Here are some photos of the Multi-Moby vehicles under test!
The two photos on the left below show the Multi-Moby passenger vehicle on road tests, while the three photos on the right show the Multi-Moby van on a test track.





October 2023 - Published journal paper
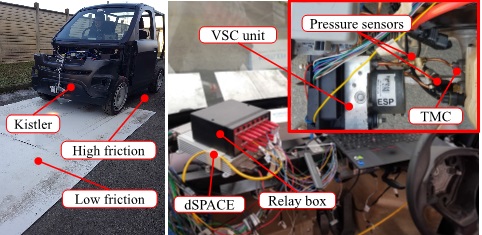
A joint paper by University of Surrey & I-FEVS, titled "On Antilock Braking Systems with Road Preview Through Nonlinear Model Predictive Control" has been published in "IEEE Transactions on Industrial Electronics".
This paper presents a nonlinear model predictive controller (NMPC) for Antilock Braking Systems (ABS) with preview of the tire-road friction profile, including proof-of-concept experiments with the Multi-Moby vehicle (see photo on the right).
Download here (open access).
September 2023 - CORDIS article

April 2023 - Published journal paper
A paper by University of Surrey, titled "Vehicle Stability Control Through Pre-Emptive Braking" has been published in "International Journal of Automotive Technology".
The paper proposes a novel nonlinear model predictive control (NMPC)-based pre-emptive braking, which imposes a braking action if the current vehicle speed is deemed safety-critical with respect to the curvature of the expected path ahead.
Download here.

March 2023 - Multi-Moby at MECSPE 2023
Join us at MECSPE, Bologna, Italy, 29/31 March 2023!
Multi-Moby partner I-FEVS will holding an exhibition on the Multi-Moby vehicles at the fair. It is free to enter!
For further details and registration, see here.

February 2023 - Published journal paper
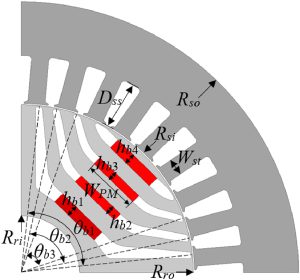
A paper by University of Surrey, titled "Design and optimisation of energy-efficient PM-assisted synchronous reluctance machines for electric vehicles" has been published in "IET Electric Power Applications".
The paper discusses the design and optimisation of a permanent magnet-assisted synchronous reluctance (PMaSynR) traction machine to improve its energy efficiency over a selection of driving cycles.
Download here (open-access).
November 2022 - General assembly
The Multi-Moby general assembly was held on 30th November 2022, at Regus Kolonienstraat 11, Brussels, Belgium. Thanks to everyone who attended, including our project officer Salima Abu Jeriban, and Maurizio Maggiore!
November 2022 - Thanks for visiting us at TRA 2022!
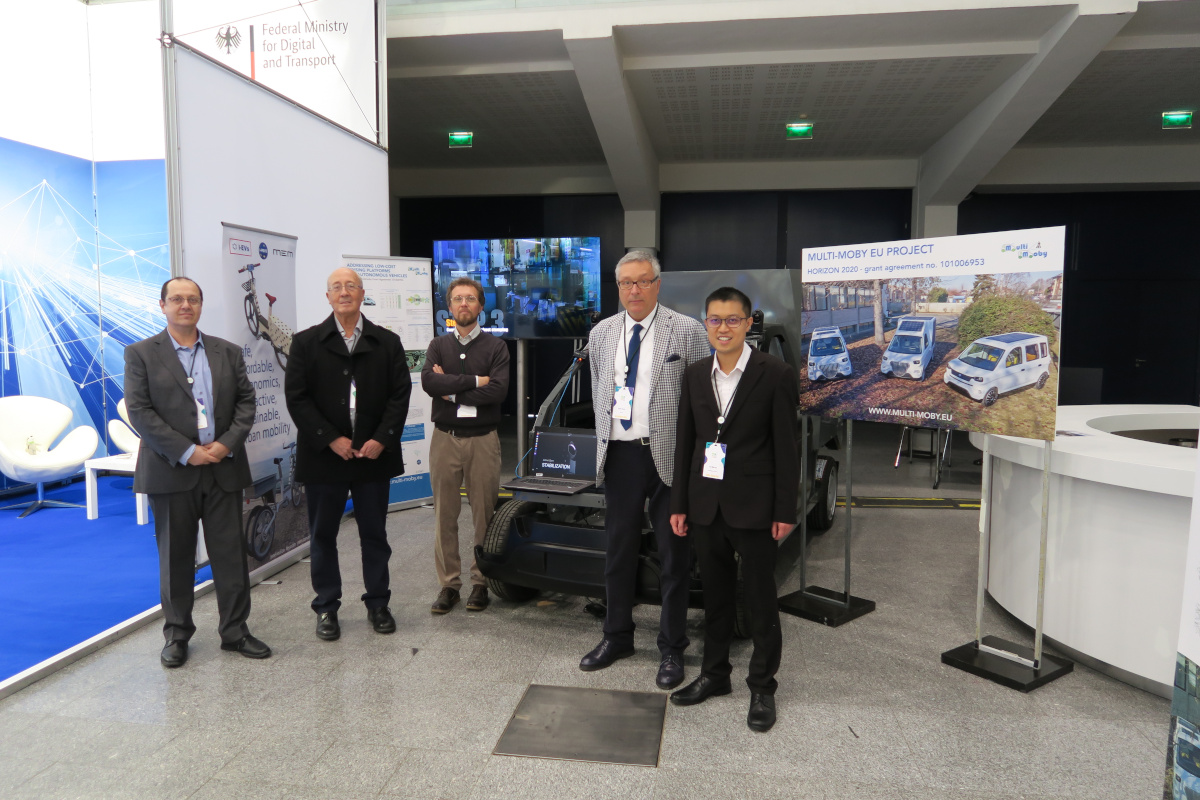
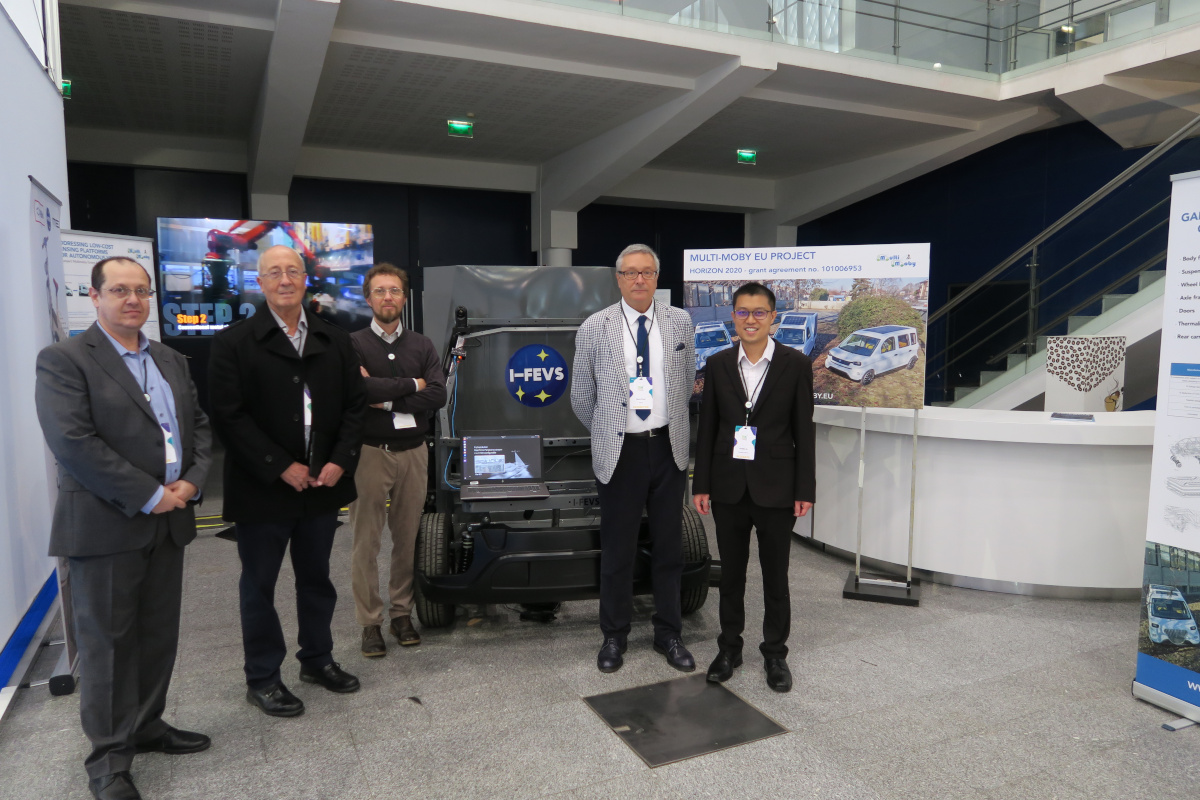
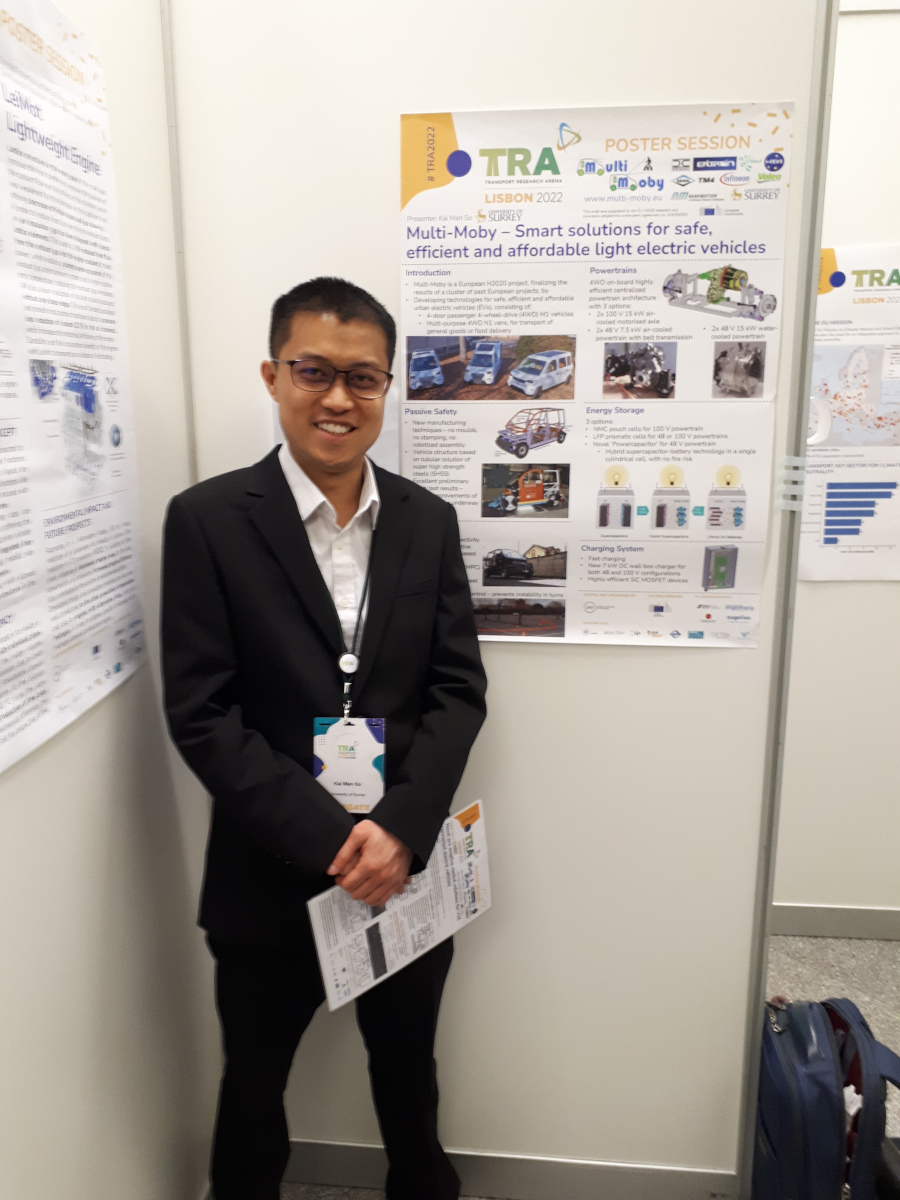
Thanks to everyone who visited the Multi-Moby booth and/or attended Multi-Moby presentations at the Transport Research Arena (TRA) 2022 conference.
You can see some of the photos below. From left to right, the first 3 photos are the Multi-Moby booth with the Multi-Moby prototype vehicle on display. The next 2 photos are the presentations by Cidaut. The last photo is a presentation by University of Surrey.
See also a video here!



November 2022 - Multi-Moby at TRA 2022 Conference
Multi-Moby will be at the Transport Research Arena (TRA) 2022 conference, with participation by Cidaut, I-FEVS, Nanomotion and University of Surrey (UoS).
3 papers will be presented, and you can find them here:
1. Tue 15th Nov, 0830–1000, Auditorium VIII, 1.2.6 Connected and automated multimodal mobility session, “#565 Novel pre-emptive control solutions for V2X connected electric vehicles”, where UoS will present the active safety controllers developed in Multi-Moby.
2. Tue 15th Nov, 1500–1630, Room 5B, 2.1.2 Carbon neutrality and zero-emission vehicles session, “#630 Multi-Moby – Smart solutions for safe, efficient and affordable light electric vehicles”, where UoS will present an overview of the Multi-Moby project.
3. Wed 16th Nov, 1700–1830, Room 5B, 3.4.5 Safety and security session, “#779 Electric urban light vehicles structural integrity and occupant protection validation through experimental crash tests”, with Cidaut discussing the passive safety of the vehicle through crash tests.
In addition, Multi-Moby will be participating in "Invited Session 35" with the E-VOLVE cluster, titled "European Innovation for the Next Generation of Electric Vehicles by E-VOLVE Cluster" on Tue 15th Nov, 1500–1630, Auditorium IV. More details can be found here.
There will also be an exhibition on Multi-Moby by I-FEVS at the European Commission Booth 2.14, Pavilion 2, for the entire conference.
The TRA 2022 conference is held at Lisbon Congress Centre, Lisbon, Portugal, from 14th to 17th November.
More details on the conference can be found here.



October 2022 - Multi-Moby at EPoSS Annual Forum
Cidaut will be at the EPoSS Annual Forum with a poster presentation titled "Role of advanced ADAS and autonomous driving capabilities in the crashworthiness design of safe urban electric vehicles" on 6th October.
The poster explains how a smart urban electric vehicle can be designed to be safe for both occupants and vulnerable road users. Visit the Dissemination page to download the poster.
The EPoSS Annual Forum 2022 is held at Centro Congressi Unione Industriali Torino, in Turin, Italy, from 4th to 7th October.
More details on the forum can be found here.

September 2022 - AVEC 2022 conference presentation slides
The 15th International Symposium on Advanced Vehicle Control (AVEC), has just ended. The presentation by University of Surrey (UoS) titled "Nonlinear Model Predictive Control for Preview-Based Traction Control" can be watched here, and the presentation slides can be downloaded here.
The presentation discusses an active safety controller - Nonlinear Model Predictive Control (NMPC) preview-based traction control. It includes a video of the Multi-Moby vehicle tested on a low friction road surface.

August 2022 - Multi-Moby at AVEC 2022 conference
University of Surrey (UoS) will be at the 15th International Symposium on Advanced Vehicle Control (AVEC), virtually presenting a paper titled "Nonlinear Model Predictive Control for Preview-Based Traction Control" on 14th September, 3.30pm (JST, UTC+9).
The paper discusses an active safety controller - Nonlinear Model Predictive Control (NMPC) preview-based traction control. It involves testing of the Multi-Moby vehicle on a low friction road surface and assessing the controller's performance.
The AVEC 2022 conference (12 - 15 September) was to be held in Japan but is now a virtual event due to the COVID situation there.
More details on the conference can be found here.

June 2022 - Multi-Moby in NeMMo 2022 congress
Join us at the NeMMo 2022 congress in Nantes, France, 6-7 July 2022!
Multi-Moby partner I-FEVS will be involved in a session, presenting "Steel Tubular space frame for battery pack integration for small Passengers, Urban Delivery Vehicles an Pick Ups. Approach to the microfactory concept and solutions".
For further details and registration, see here.

May 2022 - Introducing the Multi-Moby vehicles
Watch a video introducing the vehicles here, which includes crash tests of the vehicle.
The next steps will be to install and test active safety features (developed in the Multi-Moby project) on the vehicles.

March 2022 - Powercapacitor batteries have arrived
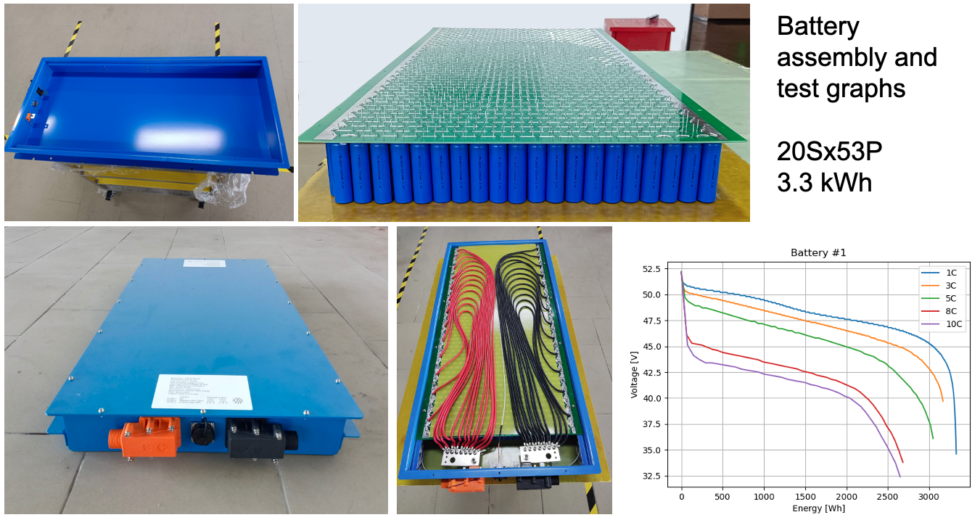
Altreonic (ALT) has now reached the milestone of delivering a powercapacitor battery pack in the Multi-Moby project.
The powercapacitor battery cell is a hybrid supercapacitor-battery in a single cell. It offers a high power density, hence a fast-charging capability in combination with many other advantages like safety (no-fire risk), simplicity and robustness (no battery management system required, no active cooling or heating needed), a high depth-of-discharge (96%) and a long cycle life (20000 cycles).
For more details, see here.
March 2022 - Multi-Moby in the Second i-HeCoBatt webinar
Multi-Moby will be presenting in the "Second i-HeCoBatt Webinar on Innovation and Industrialisation Challenges for Next-Generation EV Components" on 3 March online.
We will show the latest results on pre-emptive vehicle safety controllers, as well as the results from the Multi-moby vehicle crash tests.
The webinar is free to attend. For further details and registration, see here. Visit the Dissemination page to download the slides.

February 2022 - Accepted SAE Technical Paper
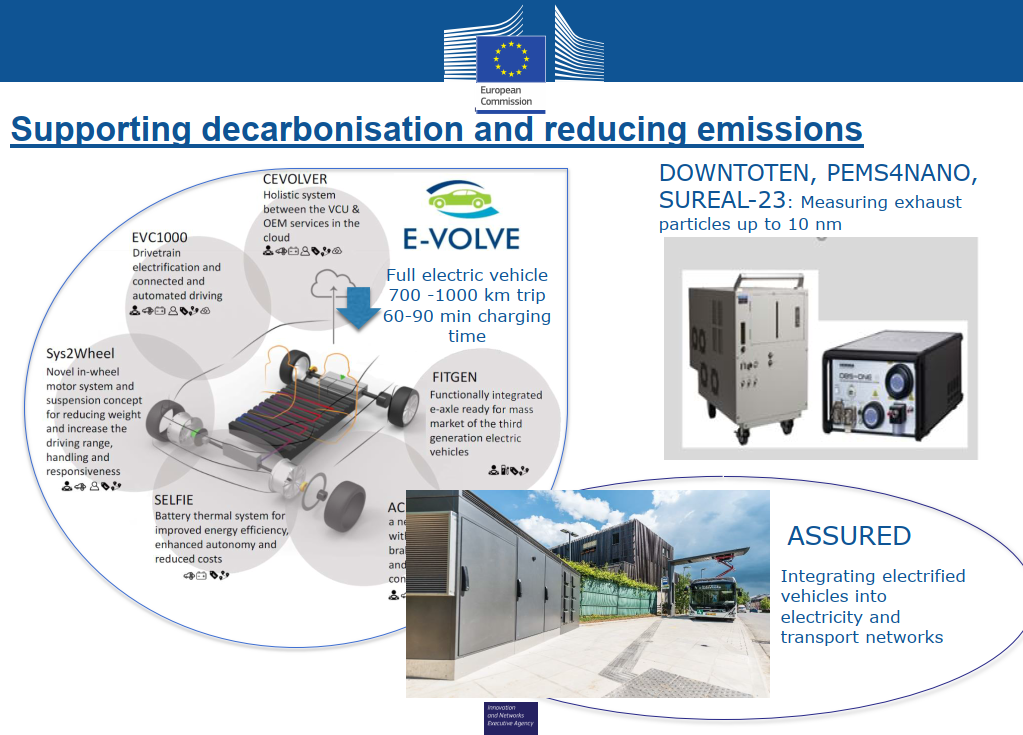
A joint paper by members of the E-VOLVE cluster, titled "Towards brand-independent architectures, components and systems for next generation electrified vehicles optimised for the infrastructure" has been accepted in "SAE Technical Papers".
The paper provides a consolidated view of several related European research programs in the E-VOLVE cluster, specifically ACHILES, SYS2WHEEL, EVC1000, CEVOLVER, and Multi-Moby.
Download here.
January 2022 - Multi-Moby vehicles structurally complete
Three of the Multi-Moby vehicles are now structurally complete. In the photo on the right, the vehicles from left to right are: 1) pick-up, 2) van, 3) passenger vehicle. The next steps are software installation on the vehicles, and subsequently on-road testing.

January 2022 - Multi-Moby in the H2020RTR21 event
Multi-Moby will be presenting in the H2020RTR21 conference on 29 March in Brussels.
The H2020RTR21 conference aims at gathering selected H2020 funded projects on road transport areas, to give the attendees an overall picture of the achievements of EU funded R&I, and to identify the next steps needed to reach the overall EU transport policy objectives.
For further details and registration, see here. Visit the Dissemination page to download the slides.

December 2021 - Accepted journal paper
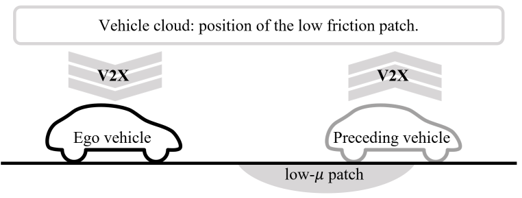
A paper by University of Surrey, titled "Predictive anti-jerk and traction control for V2X connected electric vehicles with central motor and open differential" has been accepted in "IEEE Transactions on Vehicular Technology", which is a quartile 1 journal for automotive engineering.
The paper discusses pre-emptive vehicle controllers based on Nonlinear Model Predictive Control (NMPC), which can increase passenger comfort and reduce wheel slip when the vehicle encounters a low friction patch on the road.
Download here (open-access).
November 2021 - EGVI Project Portfolio
The EGVI Project Portfolio 2018 - 2020 has been published. Multi-Moby is proud to be part of the EGVI (European Green Cars and Green Vehicles Initiative) partnership.
Download here.
November 2021 - General assembly
The Multi-Moby general assembly was held on 9-10 November 2021, in I-FEVS, Turin, Italy. This was our first face-to-face meeting since the coronavirus pandemic.

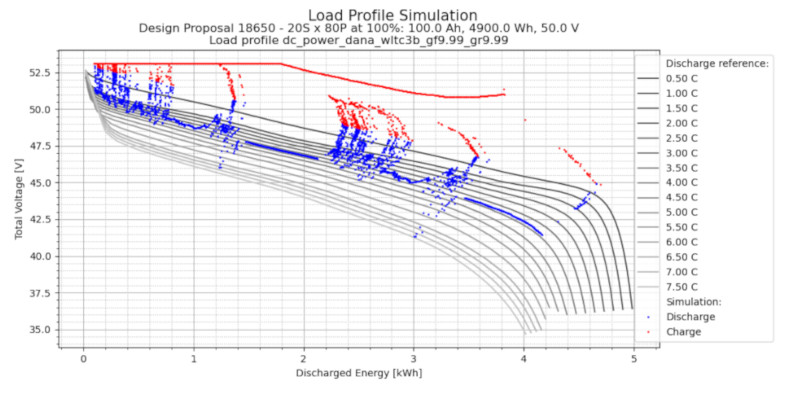
October 2021 - Battery Builder (battery load simulator) is available
Altreonic-Kurt.energy's (ALT) has developed a Battery Builder, which is a battery load simulator for configuring a battery pack before it is actually built. With a load profile and a selected reference battery as input, the Battery Builder can produce the battery load over the given profile and deduct calendar lifetime parameters taking into account the actual load, the temperature profile, and how the battery will be used.
Kurt.energy has released the Battery Builder as an online beta version that registered developers can use to submit their own load profiles. The simulator is accessed through a standard browser.
For more details, see here.
October 2021 - Vehicle testing
The Multi-Moby vehicle testing has started in I-FEVS. This includes testing the vehicle on a rolling bench, as well as a test track as seen in the photo to the right.

September 2021 - E-VOLVE
The Multi-Moby project is now part of the Electric Vehicle Optimized for Life, Value and Efficiency (E-VOLVE) cluster, which involves eight projects from the GV-01 Horizon 2020 for joint dissemination, exploitation and standardization activities.

July 2021 - Pre-emptive vehicle stability
A pre-emptive stability control function has been successfully tested on the ZEBRA vehicle by University of Surrey. This involves pre-emptive braking based on nonlinear model predictive control when the speed is too high for an upcoming road curvature.

December 2020 - Project kick-off
The Multi-Moby kick-off meeting took place on 15-16 December 2020. Due to coronavirus pandemic, it was conducted online with a teleconference.
